最近终于有空更新了,花了几天时间,弄出个小东西,虽然有很多种实现方式在网上流传了,但我却从没有试过,乘有时间,也弄出了四种方式的显示,各位帮忙看看,哪里还有不好的地方,希不吝指教。
一。原理及仿真图
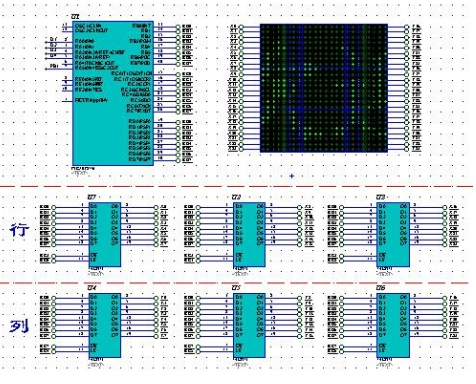
此种为从右往左显示。
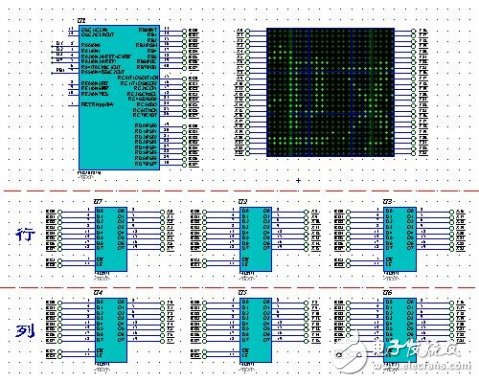
此中为从左往右显示
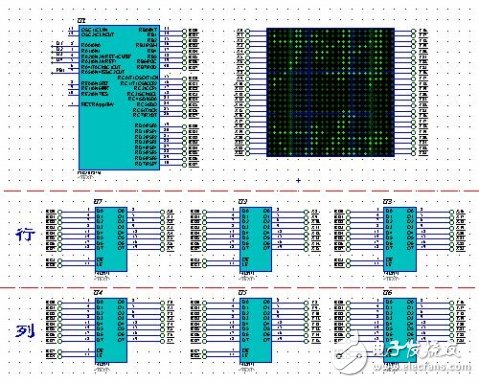
此种为从下往上显示
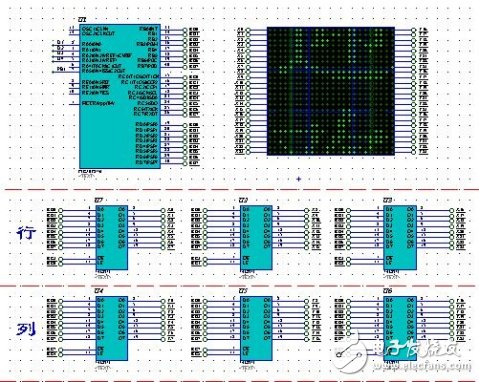
此种为从上往下显示
原理图说明:
1.本实例采用微芯PIC16F877A单片机,此单片机适合初学者
2.点阵采用24X24点,左边为行线,采用U1-U3三个74LS373地址所存芯片,复用单片机RB端口。
右边为列线,采用U4-U6三个74LS373地址所存芯片,复用单片机RD端口。
3.单片机RC端口控制六片373的选通。
4.显示原理:24列列线轮流拉为低电平时,行线输出行玛,通过一定延时,字符即可显示,并通过计算,即可实现上述四种显示方式。
二。程序(已附解释,PICC 8.05 通过)
#include
#define uch unsigned char
int offset;//定义偏置变量,以使字符运动
//以下为需显示的字符数组
const uch zxhn[]=
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x10,0x30,0xE0,0x60,0x00,0x80,0x00,0xF0,0xF0,0x10,0x00,0xF0,0xE0,
0x20,0x00,0x00,0xF0,0xF0,0x10,0x00,0x00,0x00,0x81,0x83,0x8E,0xCE,0xE0,0x78,0x76,
0x3D,0x00,0xFF,0x7F,0x04,0x38,0xFF,0xFF,0x00,0x3C,0x38,0xFF,0xFF,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x3F,0x3F,0x20,0x10,0x18,0x0E,0x07,0x00,0x00,0x00,0x1F,0x1F,
0x00,0x00,0x00,0x3F,0x3F,0x00,0x00,0x00,//“洲”,
0x00,0x00,0x00,0x30,0x60,0x00,0x80,0x70,0x30,0x90,0x40,0x40,0x40,0x40,0xE0,0xE0,
0x40,0x40,0x40,0x40,0xE0,0xE0,0x40,0x00,0x00,0x41,0x49,0x49,0x49,0xFF,0xFF,0x49,
0x6D,0x6D,0x4B,0x9C,0x8C,0x40,0xFF,0xFF,0x01,0x8E,0x8C,0x40,0xFF,0xFF,0x00,0x00,
0x00,0x40,0x20,0x10,0x0C,0x07,0x01,0x00,0x00,0x03,0x03,0x11,0x10,0x30,0x3F,0x1F,
0x11,0x11,0x10,0x70,0x3F,0x3F,0x00,0x00,//“翔”
0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0xC0,0xC0,0x80,0x00,0x00,0xE0,0xF8,0x38,
0x10,0x00,0x00,0x00,0x80,0x80,0x00,0x00,0x00,0x00,0x02,0x04,0x18,0xB0,0xE0,0xFC,
0x9F,0x23,0x10,0x0C,0x07,0xC3,0xFD,0x3D,0x3D,0xE5,0x19,0x07,0x03,0x03,0x01,0x00,
0x00,0x10,0x08,0x04,0x03,0x41,0x20,0x21,0x27,0x1F,0x18,0x0C,0x06,0x03,0x01,0x00,
0x00,0x03,0x0F,0x1C,0x38,0x18,0x10,0x10,//“欢”
0x00,0x00,0x00,0x10,0x30,0xE0,0xC0,0x00,0x00,0xC0,0xC0,0x20,0x30,0x38,0x10,0xF0,
0xC0,0x40,0x40,0x40,0xE0,0xC0,0x40,0x00,0x00,0x00,0x08,0x08,0x08,0xFC,0xFC,0x08,
0x80,0xFF,0xFF,0x40,0x20,0x20,0x00,0xFF,0xFF,0x40,0x80,0x80,0xFF,0xFF,0x00,0x00,
0x00,0x00,0x18,0x18,0x0C,0x07,0x07,0x0C,0x08,0x18,0x10,0x10,0x30,0x30,0x30,0x37,
0x37,0x30,0x30,0x31,0x30,0x30,0x10,0x08,//“迎”
0x00,0x00,0x00,0x00,0x80,0xC0,0x70,0x30,0x10,0x00,0x00,0xC0,0x70,0x78,0x50,0x40,
0x40,0x40,0x40,0xC0,0xE0,0x40,0x40,0x00,0x00,0x08,0x04,0x02,0x03,0xFF,0x7F,0x00,
0x40,0x22,0x11,0x9C,0x0E,0x44,0xC0,0xFF,0x7F,0x01,0x06,0x09,0x38,0x70,0x00,0x00,
0x00,0x00,0x10,0x30,0x3C,0x1F,0x00,0x1F,0x3F,0x31,0x30,0x30,0x37,0x37,0x30,0x38,
0x3E,0x18,0x01,0x02,0x0E,0x1C,0x18,0x00, //“您”
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
const uch col[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};//列码
//初始化子程序
void init()
{
ADCON1=0x06;//初始化RA口为普通数字端口
TRISA=0X20;
PORTA=0;
TRISB=0;
PORTB=0;
TRISC=0;
PORTC=0;
TRISD=0;
PORTD=0;
}
//延时子程序
void delay1ms()
{
uch i;
for(i=0;i《150;i++)
{NOP();
}
}
//从右往左显示
void display1()
{
uch i,j,k,t,n;
int m=0;//字符定位变量
for(n=0;n《6;n++)
{
for(offset=0;offset《24;offset++)//偏置最多24位
{
for(t=0;t《4;t++)//每个位置显示4次
{
for(i=0;i《24;i++)//取数,每行24列,故取24个数
{
PORTD=0xff;//一开始先把列置高电平,关显示
PORTC=0x70;
NOP();
PORTC=0;
PORTB=zxhn[i+offset+m];//取行码
if((i+offset)》23)PORTB=zxhn[i+offset+48+m];
RC0=1;
NOP();
RC0=0;
PORTB=zxhn[i+24+offset+m];
if((i+offset)》23)PORTB=zxhn[i+offset+72+m];
RC1=1;
NOP();
RC1=0;
PORTB=zxhn[i+48+offset+m];
if((i+offset)》23)PORTB=zxhn[i+offset+96+m];
RC2=1;
NOP();
RC2=0;
j=i/8;//求需要选通的行线
k=i%8;//求需要选通的列线
PORTD=col[k];
switch(j)
{
case 0: RC4=1; NOP(); RC4=0; break;
case 1: RC5=1; NOP(); RC5=0; break;
case 2: RC6=1; NOP(); RC6=0; break;
}
delay1ms();//视觉暂留
}
}
}
m=m+72;//定位下一个初始字符
}
}
//从左往右显示
void display2()
{
uch i,j,k,t,n,tt1,tt2,tt3;
int m=0;//字符定位变量
for(n=0;n《6;n++)
{
for(offset=24;offset》0;offset--)//偏置最多24位
{
for(t=0;t《4;t++)//每个位置显示4次
{
for(i=24;i》0;i--)//取数,每行24列,故取24个数
{
if((i+offset)》23)
{
tt1=zxhn[i+offset-24+m];
tt2=zxhn[i+offset+m];
tt3=zxhn[i+offset+24+m];
}
else
{
tt1=zxhn[i+offset+m+72];
tt2=zxhn[i+offset+m+96];
tt3=zxhn[i+120+offset+m];
}
PORTD=0xff;//一开始先把列置高电平,关显示
PORTC=0x70;
NOP();
PORTC=0;
PORTB=tt1;//取行码
RC0=1;
NOP();
RC0=0;
PORTB=tt2;
RC1=1;
NOP();
RC1=0;
PORTB=tt3;
RC2=1;
NOP();
RC2=0;
j=(i-1)/8;//求需要选通的373
k=(i-1)%8;//求需要选通的列线
PORTD=col[k];
switch(j)
{
case 0: RC4=1; NOP(); RC4=0; break;
case 1: RC5=1; NOP(); RC5=0; break;
case 2: RC6=1; NOP(); RC6=0; break;
}
delay1ms();//视觉暂留
}
}
}
m=m+72;
}
}
//从下往上显示
void display3()
{
uch i,j,k,t,n,tt1,tt2,tt3,l;
int m=0;//字符定位变量
for(n=0;n《18;n++)
{
for(l=0;l《7;l++)//滚动8位
{
for(t=0;t《3;t++)//每个位置显示4次
{
for(i=0;i《24;i++)//取数,每行24列,故取24个数
{
tt1=(zxhn[i+m]》》l)|(zxhn[i+24+m]《《(8-l));
tt2=(zxhn[i+24+m]》》l)|(zxhn[i+48+m]《《(8-l));
tt3=(zxhn[i+48+m]》》l)|(zxhn[i+72+m]《《(8-l));
PORTD=0xff;//一开始先把列置高电平,关显示
PORTC=0x70;
NOP();
PORTC=0;
PORTB=tt1;//取行码
RC0=1;
NOP();
RC0=0;
PORTB=tt2;
RC1=1;
NOP();
RC1=0;
PORTB=tt3;
RC2=1;
NOP();
RC2=0;
j=i/8;//求需要选通的373
k=i%8;//求需要选通的列线
PORTD=col[k];
switch(j)
{
case 0: RC4=1; NOP(); RC4=0; break;
case 1: RC5=1; NOP(); RC5=0; break;
case 2: RC6=1; NOP(); RC6=0; break;
}
delay1ms();//视觉暂留
}
}
}
m=m+24;
}
}
//从上往下显示
void display4()
{
uch i,j,k,t,n,tt1,tt2,tt3,l,a,b;
int m=0;//字符定位变量
for(n=0;n《6;n++)
{
for(l=0;l《24;l++)
{
for(t=0;t《3;t++)//每个位置显示4次
{
for(i=0;i《24;i++)//取数,每行24列,故取24个数
{
a=l/8;
b=l%8;
if(a==0)
{
tt1=(zxhn[i+m]《》(8-b));
tt2=(zxhn[i+24+m]《》(8-b));
tt3=(zxhn[i+48+m]《》(8-b));
}
if(a==1)
{
tt1=(zxhn[i+m+120]《》(8-b));
tt2=(zxhn[i+m]《》(8-b));
tt3=(zxhn[i+24+m]《》(8-b));
}
if(a==2)
{
tt1=(zxhn[i+m+96]《》(8-b));
tt2=(zxhn[i+m+120]《》(8-b));
tt3=(zxhn[i+m]《》(8-b));
}
PORTD=0xff;//一开始先把列置高电平,关显示
PORTC=0x70;
NOP();
PORTC=0;
PORTB=tt1;//取行码
RC0=1;
NOP();
RC0=0;
PORTB=tt2;
RC1=1;
NOP();
RC1=0;
PORTB=tt3;
RC2=1;
NOP();
RC2=0;
j=i/8;//求需要选通的行线
k=i%8;//求需要选通的列线
PORTD=col[k];
switch(j)
{
case 0: RC4=1; NOP(); RC4=0; break;
case 1: RC5=1; NOP(); RC5=0; break;
case 2: RC6=1; NOP(); RC6=0; break;
}
delay1ms();//视觉暂留
}
}
}
m=m+72;
}
}
void main()
{
uch mo;
init();
while(1)
{
display1();
display2();
display3();
display4();
}
}
三。总结
虽然已有四种方式显示了,但我觉得可以尝试更多的方式,例如,可以象滚轮子一样,旋转着从左滚到右显示,只是数据处理的量可能大了些,已经有两个自由度了,而我的四种只有一个自由度。由于本人水平有限,没有想到什么好的思路,不过希望抛砖引玉,写出这种显示方式。