(空军工程大学导弹学院,陕西.三原,713800) 阚保强 王建业
摘 要
本文提出了一种基于TLV1562的四通道实时数据采集处理系统的设计与实现方案,该设计以TLV1562、EP1K100和AD7533(四片)为核心器件,具有四个独立的A/D,D/A通道,能实现10位数据采集与回放;该系统应用到雷达实时自适应噪声对消器中,结果表明,该系统能够满足实时雷达信号对消处理要求,效果较好。
关键词 TLV1562 ; 实时数据采集; VHDL
中图法分类号 TN911
1 引言
在雷达杂波对消器设计时,传统的方法是采用中频对消,即杂波的抑制在中频上实现。早期的中频对消器常采用SAW(声表面波)和CCD(电荷耦合器件)等模拟延时线。由于数字信号处理所具有的突出优点,尤其是数字集成电路的发展以及可编程逻辑器件功能的日益强大,使得数字式矢量对消器成为当前及今后的主要工作模式 。 而对雷达信号的采集与处理成为最为关键的环节,在设计中笔者选择了精度为10位的高速低功耗可重配置TLV1562,在较低成本下实现了多通道数据采集处理 。
2 系统设计与实现
2.1系统总体设计
系统设计框图如图1所示,以TLV1562为核心的前端采集系统是整个系统的一部分。整个系统由信号调理、信号采样、高速信号处理(数字对消)以及波形回放等组成。信号调理电路是对经相干检波送来的信号进行压缩调整以满足TLV1562的采样电平;信号采样是完成模拟信号的数字化(由TLV1562完成);高速数字信号处理是在CPLD内完成数字式对消算法;由AD7533构成的波形回放部分是将对消处理过信号送到显示屏显示[3.4.5]
|
|
| 图1 雷达对消器系统总框图 |
2.2信号调理电路与A/D参考基准源的设计
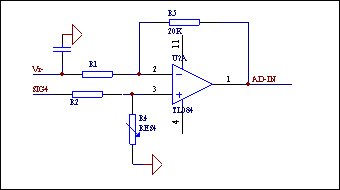
由于对于规定的电源电压AVDD,TLV1562的模拟输入信号的范围为0.8~(AVDD-1.9伏),所以必须要对相干检波出来的模拟信号进行处理,使其满足要求。设计中,采用了如图2所示的调理电路,R4用来调整输入信号SIG4的幅度范围,Vr-是由TL431调整出来的一个基准电压,用来控制信号的直流电压[3]。
|
|
| 图2 信号调理电路 |
TLV1562有两个基准输入引脚--REFP和REFM。这两个脚上的电平分别是产生满度(full-scale)和零度(zero-scale)读数的模拟输入的上下限。根据要求基准电压必须满足
下列条件:
VREFP<=AVDD-1V ;
AGND+0.9V<VREFM ;
3V>=(VREFP-VREFM)>=0.8V 。
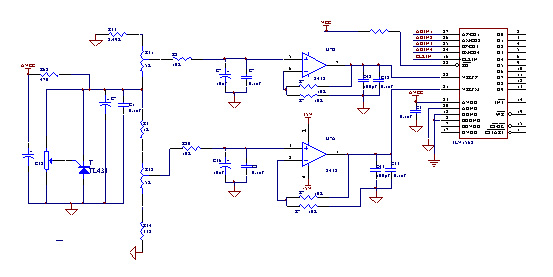
所以设计中采用图3所示的基准设计。通过调整R31和R32,使VREFP与VREFM满足上诉要求。
2.3 采集系统的设计
2.3.1 接口时序图
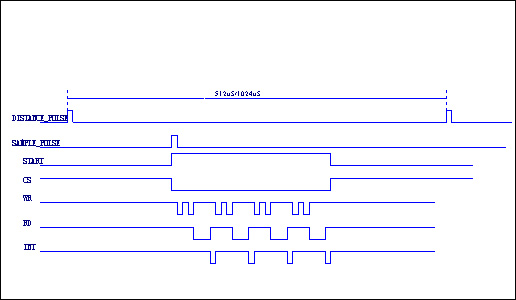
CPLD与TLV1562的接口时序图见图3。DISTANCE_PULSE是距离门脉冲,周期为512μs(80Km)或1024μs(160Km),SAMPLE_PULSE是采样开始脉冲,一旦监测到其上升沿采集系统就开始启动,START被置为高电平,TLV1562的CS置为低。WR、RD、INT的时序图是TLV1562的内部转换模式时序图。当WR出现两次低电平后,便完成了对寄存器CR0和CR1的配置,即实现了A/D转换的初始化。A/D转换结束,输出低电平信号INT有效,信号RD读取A/D转换结果并复位INT信号,完成一个转换周期,并开始准备下一次转换。
|
|
| 图3 EP1K100与TLV1562的接口时序图 |
2.3.2 CPLD对TLV1562接口的实现
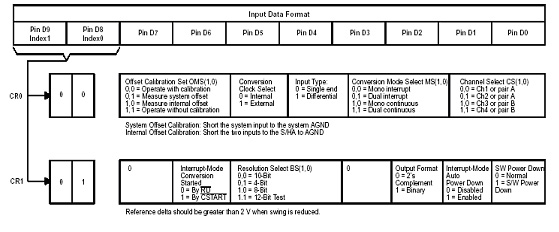
由于TLV1562芯片是可配置A/D转换器,其配置转换时序图见图。所以如何利用CPLD实现对TLV1562的配置与读写是关键技术之一。对于TLV1562的读写控制易于实现,而对于其配置,由于是对四通道循环采集,较为复杂。在TLV1562中有两个寄存器需要配置,也就是要有两次写,而每次配置的数据还不一样(见表一),所以应该在每次写的时候都应相应的提供数据。整个配置过程用VHDL语言采用有限状态机的方式来实现。定义5个状态,分别为st0,st1,st2,st3,ST4,st0是空闲态,st1,st2,st3,ST4是对应相应采集通道的状态,INDEXREG[1..0]是用来监测写信号的第几次写的标识码。 程序如下:
type states is (st0,st1,st2,st3,ST4);
signal current_state,next_state :states :=st0;
signal indexreg:STD_LOGIC_vector(1 downto 0);
signal chanel_data: STD_LOGIC_vector(9 downto 0);
begin
indexreg<=index_reg; cs<=not start;
process(current_state,indexreg,ad_ale)
begin
if ad_ale='0' then
chanel_data<="ZZZZZZZZZZ";
&else
if indexreg="10" then
chanel_data<="0100000100";
else
case current_state is
when st0=>ad_end<='0'; chanel<="00";
next_state<=st1;
chanel_data<="0011000000";
when st1=> ad_end<='0';chanel<="01";
next_state<=st2;
chanel_data<="0011000001";
when st2=> ad_end<='0';chanel<="10";
next_state<=st3;
chanel_data<="0011000010";
when st3=> ad_end<='1';chanel<="11";
next_state<=st0;
chanel_data<="0011000011";
when st4=> next_state<=st0;
chanel_data<="0011000000";
when others=> ad_end<='1'; next_state<=st0;
chanel_data<="0011000000";
end case;
end if;
end if;
end process;
|
|
| 表一 控制寄存器配置表 |
3 结束语
文中详述了基于TLV1562和EP1K100的多通道高速采集系统的设计及实现方法,将该采集系统应用到雷达数字式对消器中,结果证明精度和速度都能满足要求。实现了在较低的成本下实施多通道数据采集处理。
参考文献:
[1]斯德源. 数字式零中频杂波对消器[J] 现代雷达,1999,(2):49~52.
[2] 丁鹭飞,耿富录.雷达原理[M] 西安:西安电子科技大学出版社,1995.
[3] TLV1562 USER GUIDE, TI Co.US,1999.
[4] HIGH-SPEED LOW-POWER RECONFIGURABLE ANALOG-TO-DIGITAL TLV1562 ,Datasheet, TI Co.US,1998.
[5]胡国荣.基于专用集成电路的雷达动目标检测信号处理器[J] 电子学报,1998,(4):36~40.
Design and implementation of four channel real time data
acquisition and processing system
KAN Baoqiang WANG Jianye
Abstract: A new scheme to design and implement a four channel real time data acquisition and processing is presented. The system is based on EP1K100 and adopts TLV1562 as the A/D device .
It has four separate A/D and D/A channels ,capable of implementing 10-bit data acquisition and playback. A real-time adaptive noise cancellation experiment is implemented on the designed system ,and this proves that the system can make better results.
Key words :TLV1562;real-time data acquisition ; vhdl