摘 要:介绍了顶帆和顶舵雷达天线转台仿真系统的组成、天线的结构型式和方位转台的传动型式,对天线背架以及顶帆雷达的转盘和尾翼等一些关键部件的结构特点及设计原理作了分析,提供了天线和方位转台的主要参数。
关键词:顶帆雷达;顶舵雷达;天线转台系统;仿真设计
1引言
同明斯克号航母一样,现停泊在渤海湾的基辅号航母也将被改造成为海上军事主题公园,供人们游览观赏。由前苏联研制的这两艘航母,过去都配置有顶帆、顶舵和前灯雷达,雷达的天线转台系统架设在航母岛式上层建筑的甲板上,工作在海洋环境中。在这些雷达设备中,顶帆雷达的天线转台系统体积最大,所在的位置最高,特别引人注目。由于任务的需要,笔者负责基辅号航母上三种四部雷达的天线转台仿真系统的研制工作。这里主要就顶帆和顶舵雷达天线转台系统的仿真设计问题进行讨论。
2雷达天线转台仿真系统的设计要求
(1)雷达天线转台仿真系统的外形和组成应与原雷达相类似,系统中天线的形状、构成和主要尺寸应与原雷达基本一致。
(2)本系统各组成部分的零件均用金属材料制造。
(3)在风速不大于20 m/s的情况下,系统工作正常,方位转台能使天线以3 r/min的转速在水平面内作方位旋转运动。
(4)本系统各组成部分的结构应具有足够的强度和刚度。在风速不大于35m/s的情况下,系统结构不破坏。
(5)尽量减轻系统的重量。
3雷达天线转台仿真系统的组成
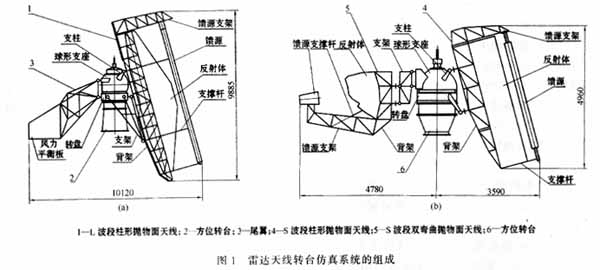
图1(a)和(b)分别给出了顶帆和顶舵雷达天线转台仿真系统的组成。顶帆雷达天线转台仿真系统主要由L波段柱形抛物面天线、方位转台和尾翼等部分组成,天线和尾翼设置在方位转台的两侧。天线通过支架和支柱分别与方位转台的转盘和球形支座固定,尾翼通过法兰与转盘和球形支座联接。在尾翼上设置有平衡重和风力平衡板。顶舵雷达天线转台仿真系统主要由S波段柱形抛物面天线、S波段双弯曲抛物面天线和方位转台等部分组成,两种天线背靠背地设置在方位转台的两侧。S波段柱形抛物面天线通过支柱与方位转台的转盘和球形支座固定,S波段双弯曲抛物面天线通过支架与球形支座联接。
4天线的结构型式与主要参数
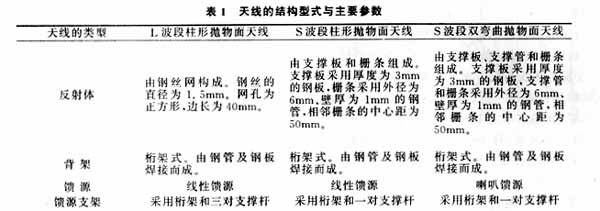
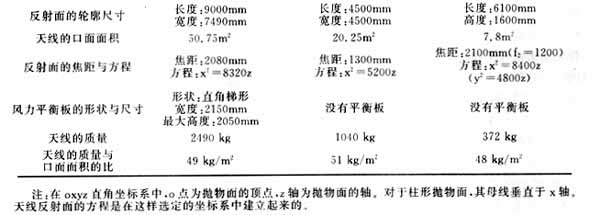
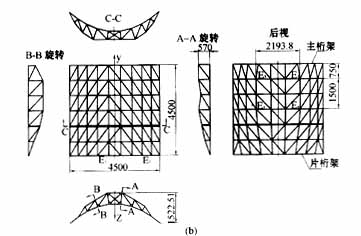
顶帆雷达的L波段柱形抛物面天线、顶舵雷达的S波段柱形抛物面天线和S波段双弯曲抛物面天线都是由反射体、背架、馈源和馈源支架等部件组成的(见图1)。表1给出了这三种天线的结构型式和主要参数。对于L波段柱形抛物面天线,用作反射体的钢丝网可以用直径为1.5mm的钢丝捆绑在背架的钢管上。对于S波段柱形抛物面天线,支撑板的型面方程与反射面的方程一致。支撑板(8个)通过弯角件与背架联接。在支撑板的型面上设置栅条,两者通过焊接固定。对于S波段双弯曲抛物面天线,支撑板和栅条的型面方程为y2=4800z,支撑管的型面方程为x2=8400z。支撑板(14个)通过弯角件与背架联接。先在支撑板的型面上设置支撑管,然后在支撑管的型面上设置栅条,均通过焊接固定。
5天线背架的构成
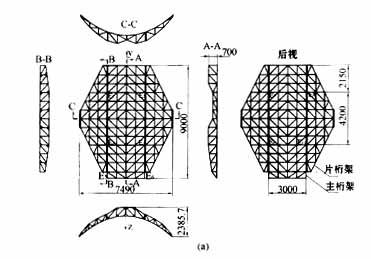
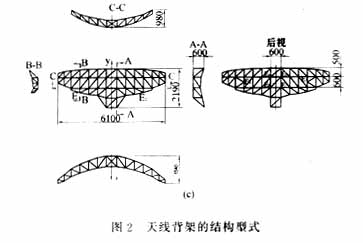
图2(a)、(b)和(c)分别提供了L波段柱形抛物面天线、S波段柱形抛物面天线和S波段双弯曲抛物面天线背架的结构型式。这三种天线的背架均采用桁架结构,其结构特点及设计原理如下:
(1)天线的背架都是由钢管(无缝钢管20)及用作法兰的厚钢板(Q235)焊接而成的。对于L波段柱形抛物面天线的背架,钢管的外径和壁厚为42×4、36×3、30×2、25×2、20×2。对于S波段柱形抛物面天线和S波段双弯曲抛物面天线的背架,钢管的外径和壁厚为36×3、30×2、25×2、20×2。这三种背架的对称性较好,造型美观。
(2)背架的基本单元是6面体,包含有8个结点18根杆件,具有几何不变性。这三种背架的刚度高,承载能力强。
(3)对于L波段柱形抛物面天线和S波段双弯曲抛物面天线的背架,其基本单元中,有4个面平行于z轴,有1个面的法线与反射面上相对应的那部分曲面在某点处的法线基本一致。对于S波段柱形抛物面天线的背架,其基本单元中,有2个面平行于z轴,有2个面垂直于反射面,有1个面的法线与反射面上相对应的那部分曲面在某点处的法线基本一致。该背架结构匀称,刚度高。
(4)L波段柱形抛物面天线的背架由主桁架和2个片桁架组成,S波段柱形抛物面天线的背架由主桁架和1个片桁架组成,主桁架与片桁架通过法兰联接,这样便于背架的运输和架设。
(5)对于L波段柱形抛物面天线,背架上的E1~E6点为背架与支撑杆的连接点,E7~E10点为背架与安装法兰的连接点。对于S波段柱形抛物面天线,背架上的E1和E2点为背架与支撑杆的连接点,E3~E6点为背架与安装法兰的连接点。对于S波段双弯曲抛物面天线,背架上的E1和E2点分别通过支撑杆与馈源支架上相应的E1和E2点联接,E3和E4点分别通过支撑杆与方位转台壳体上相应的E3和E4点联接,这样有利于提高天线的刚度。背架上的E5~E8点为背架与安装法兰的连接点。
6方位转台的传动型式
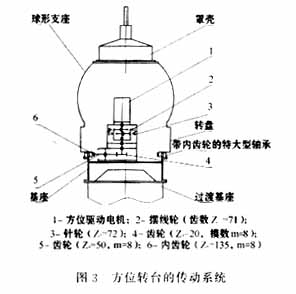
图3表示了顶帆和顶舵雷达方位转台的传动系统。可以看出,方位驱动电机通过一级摆线针轮行星齿轮传动、一级圆柱齿轮传动和一级内齿轮传动,使天线系统作方位旋转运动。总传动比I t可以用下式来计算:
总传动比为正值,这表明天线的旋转方向与方位驱动电机的旋转方向相同。已知电机的转速nm=1440 r/min ,利用下式可以求出天线的转速nL的值:
本方位转台的传动型式及其特点可以归纳为以下几点:
(1)采用摆线针轮行星齿轮传动机构。该机构传动比大(此处传动比i=71),结构紧凑,体积小,重量轻,运转平稳,承载能力强,传动效率高。但主要零件都要用优质轴承钢制造,而且零件的工艺性要求高。本方位转台实际上采用了BLY33-71-5.5型摆线针轮减速器,该减速器的输入功率为5.5 kW,许用输出转矩为2407 N·m。
(2)采用圆柱齿轮传动机构。该机构结构简单,加工方便,传动效率高,工作可靠。圆柱齿轮5是一个惰轮,其齿数对总传动比的数值没有影响。采用齿轮5是为了减小摆线针轮减速器与内齿轮的中心距,从而达到避免减速器的外壳与球形支座的内壁相碰的目的。
(3)采用内齿轮传动机构。该机构结构简单、紧凑,工作可靠。由于采用内齿轮传动,方位驱动电机不随转盘一起转动,所以电机接线不需要汇流环,这对于简化结构非常有利。
(4)采用特大型单排球轴承。该轴承能同时承受径向力、轴向力和倾覆力矩,它的应用对于简化结构、减小轴向尺寸起重要作用。本方位转台实际上采用了QNB1250-32型带内齿轮的特大型单排球轴承,该轴承的外径为1374 mm,滚道中心直径为1250 mm,滚动体直径为32 mm。
7 转盘和尾翼的结构
顶帆雷达的转盘和尾翼是天线转台仿真系统中的关键部件,此处着重对这两种部件的结构进行分析。
7.1转盘
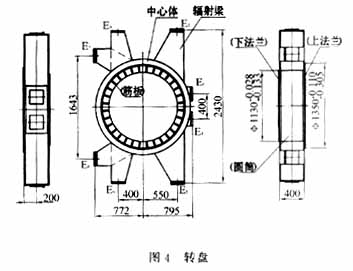
转盘(图4)采用板梁结构,由厚钢板焊接而成,其结构特点及设计原理如下:
(1)转盘可以看作是由中心体和8个辐射梁构成的。中心体包含有上法兰、下法兰、圆筒和32个筋板,承载能力强。辐射梁的横截面为矩形,刚度高。
(2)转盘通过上法兰与球形支座(见图3)联接(直径为1350 mm的圆柱面为配合面),通过下法兰与带内齿轮的特大型轴承的内圈联接(直径为1130 mm的圆柱面为配合面)。
(3)法兰E1~E3用于安装左支架(见图1(a)),E4~E6用于安装右支架。法兰E7和E8用于安装尾翼。
(4)法兰E2、E5、E7和E8均设有凸台,这对于提高转盘承受天线和尾翼的重力载荷的能力是至关重要的。
7.2尾翼
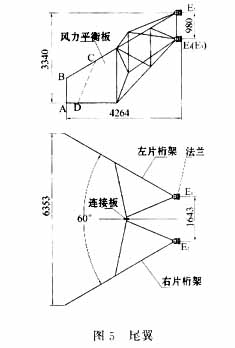
尾翼(图5)采用桁架结构,由钢管(外径×壁厚:95 mm×4 mm)、球形件、法兰及钢板焊接而成。它包含有左片桁架和右片桁架等零部件。其结构特点及设计原理如下:
(1)桁架的跨度大,对称性较好。
(2)桁架结构合理,具有足够的强度和刚度。
(3)左、右片桁架通过连接板联接,便于运输与架设。
(4)尾翼上设置有平衡重(在四边形ABCD中)和风力平衡板。前者用于天线的重力平衡,后者用来减小天线系统的方位风力矩。
(5)法兰E1和E2用来与球形支座(见图1(a))联接,E3和E4用来与转盘联接。
8 结束语
顶帆和顶舵雷达天线转台系统的仿真设计是依据笔者对明斯克号航母雷达结构的分析研究资料进行的,并已付诸实施。雷达天线转台仿真系统结构合理,造型美观,完全达到预定的设计要求。
参考文献:
〔1〕 肖万选.几种舰载雷达天线的结构分析〔J〕.电子机械工程,1999(6).
〔2〕 肖万选.几种雷达天线背架的结构型式〔J〕.舰船电子对抗,2001(2).
〔3〕 成大先.机械设计手册〔M〕.北京:化学工业出版社,1993