这是一个基于51单片机的轮式机器人的运动控制系统
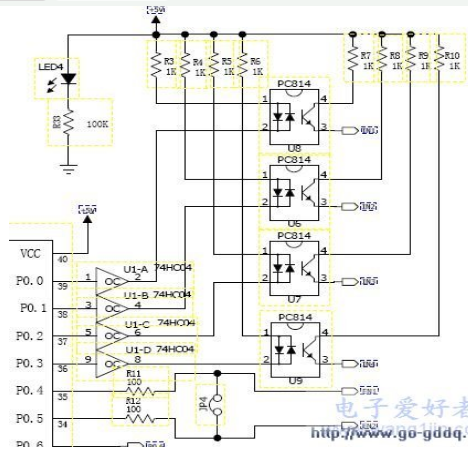
在网上找了很多的资料,做得都不是很全。上传的是我的电路,用的还是老牌芯片L293,主控芯片是51单片机。这个电路使用个光耦隔离,电机地和电源地隔离,还用了一个74HC04做反相器,利于编程。电路图倒是很简单,只是没人做的这么全面。不多说了,上图。
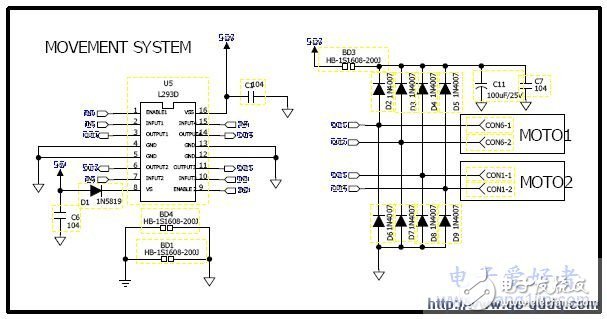
单片机部分不说了,L293部分用的BD1什么的是磁珠,用磁珠来实现单点接地和电源隔离。那几个IN4007是续流二极管。那几个电容式滤波电容就不多少了。
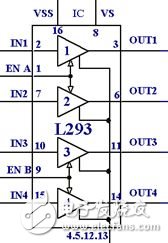
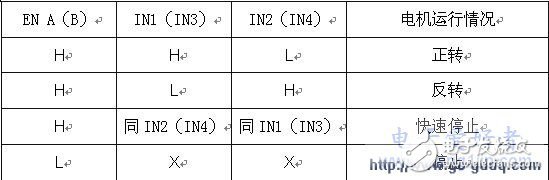
下面是L293的引脚控制表: