基于MSP430F149单片机的光电编码器位置检测系统设计
Abstract:Aiming at requirement of the position detection in iron and steel industry,a photoelectrical encoder position detection system based on MSP430 is designed.In this paper,the principal of photoelectrical encoder and the structures of the hardware and software in this position detection system is introduced in detail.In the whole system,the simple structure , stable performance and good effects are realized.
Key words: photoelectrical encoder ,position detection, MSP430 Microcontroller
在实际的工业位置控制领域中,为了提高控制精度,准确地对控制对象进行检测是十分重要的。传统的机械测量位移装置已远远不能满足现代生产的需要,而数字式传感器光电编码器,能将角位移量转换为与之对应的电脉冲输出, 主要用于机械位置和旋转速度的检测,具有精度高,体积小等特点,因此决定采用光电编码器进行位移检测。
美国TI公司推出的MSP430系列16位单片机,具有低功耗,运行速度快等优点,正日益得到广泛的应用。本文将高精度MSP430单片机应用在系统中,作为整个系统的控制器,整个系统结构简单,抗干扰性强,满足了钢铁厂的生产要求。
1、光电编码器原理
光电编码器是集光、机、电技术于一体的数字化传感器,其基本原理就是在特制的码盘上按一定规律编排光栅图案,将这些图案用光电头读取,转变为高低有序排列的电平信号。光电编码器输出信号为A , B , Z 3 个信号,其中A , B 为相位差90°的方波信号, Z 为过零脉冲信号。如图1所示,光电编码器每旋转一周,A、B 相输出同样数量的脉冲, Z相输出一个脉冲,脉冲的个数和电机旋转角度,电机的运行距离成正比关系,因此通过计算脉冲数就能计算出电机在实际运行中所运行的距离。
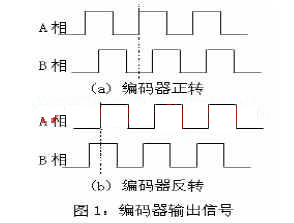
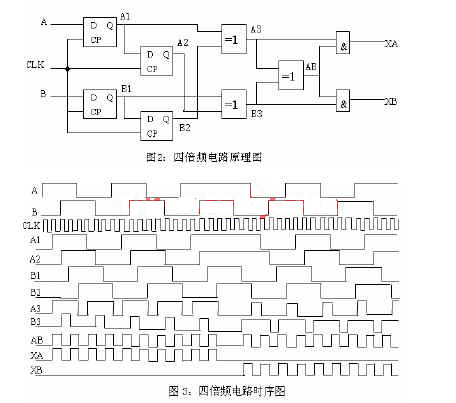
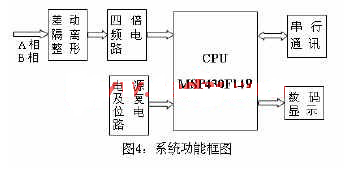
A相、B相都是光电编码器产生的,这两个信号的前沿和后沿都对应着光电码盘的1/4节距的信息。因此在实际中为了提高光电编码器的定位精度通常采用四倍频方法进行处理。鉴相就是通过分析图1的A相,B相信号,得出电机的旋转方向。如果A相脉冲超前B相90,说明电机正转,如果B相脉冲超前A相脉冲90,说明电机反转。本系统设计了一种四倍频电路,其原理图如图2所示,相应的时序图如图3所示。由时序图3可以看出,A和B信号经四倍频电路后,输出信号为XA,XB两个信号,在同一时刻,XA,XB只有一个是脉冲信号,另一个是高电平。因此,将XA,XB两个信号连接到单片机相应的端口上,对这两个信号分别进行判断、计数和计算,就可以得出相应的电机转向和位移量。
2、系统功能
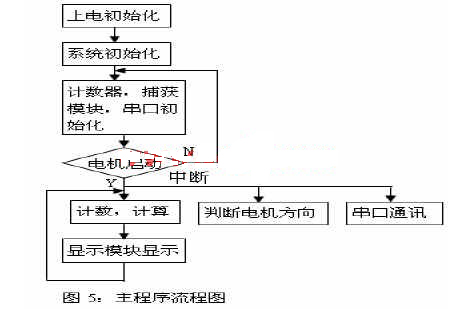
系统框图见图4。整个系统主要由差动隔离整形,倍频电路,鉴相计数模块,主控芯片,通讯模块,数显模块组成。光电编码器选用SIEMENS公司的1XP8001-1型号,输出电压为5V。从光电码盘输出的A,B,A-,B-经过差动隔离整形模块后能减少现场对信号产生的干扰,尤其是共模干扰,处理后的信号经四倍频电路后连到主控芯片,对脉冲进行计数,处理,计算,得到被控对象的位移结果。位移结果一方面送数显表显示,另一方面可通过串口将位移结果送到上位机,便于在上位机中进行统计,打印,综合分析。
3、系统硬件组成
3.1 、主控芯片及外围电路
主控芯片我们采用MSP430F149单片机,它具有处理能力强,运行速度快,功耗低等特点; 整个系统采用3.3V供电,本设计电源部分采用TI公司的TPS76033芯片实现,该芯片能很好的满足系统的要求,另外TPS76033芯片的封装很小,又能节约PCB板面积。
复位电路采用MAX809STR芯片,复位电路可以采用R-C复位电路,但是使用复位芯要比使用R-C复位电路的可靠性高,因此我们就采用MAX809STR芯片来实现系统的复位。
数显电路采用LED显示方式,MSP430具有丰富的I/O口资源,采用并行方式与LED连接非常方便,这种方式既能满足现场的要求,又可以降低系统成本。在单片机与数码显示连接时选择P4.0~P4.7引脚用来输出显示数据,P2.1,P2.2,P2.3,P2.4引脚用来控制数码管的选通状态。
3.2 、16位计数器
本次设计采用MSP430F149提供的计数器对倍频后的XA,XB信号进行计数。MSP430F149提供了两个16位的计数器,分别是Timer_A,Timer_B,这是两个用途非常广泛的16位计数器,在设计中使用Timer_A计数器进行计数,将XA和XB两个信号相或后与Timer_A相连,即XA和XB相或后与P1.0引脚相连。无论电机正转还是反转,计数器引脚上都有脉冲信号,都可进行计数。为了判断电机的旋转,使用计数器的捕获模块对XA和XB信号进行方向判断,Timer_A计数器中提供有3个捕获模块,均可以满足系统的需要。编码器四倍频电路输出的XA信号与捕获模块1相连,XB与捕获模块2相连,即XA信号同时与P1.2引脚相连,XB信号同时与P1.3引脚相连。捕获模块捕获XA和XB信号的上升沿,通过程序的判断就可以判断出电机的旋转方向。
3.3、 串行模块
MSP430单片机使用RS-485协议与上位机进行通讯, RS-485改进了RS-232的缺点,传输速率可达到10MB/S,传输距离达1200米。由于MSP430输出的是TTL电平,而RS-485串口卡是485电平,因此需进行电平转换。本系统采用MAX485芯片实现TTL电平与485电平之间的转换。硬件连接使用USART0串口,即连接时使用P3.4,P3.5引脚与MAX485的相应引脚相连。
4、系统软件实现
系统采用C语言进行程序设计,大大提高了开发调试的工作效率。整个系统程序包括主程序,鉴相计数程序,显示子程序,串行通讯程序几个模块组成。程序流程图见图5。
主程序主要包括系统的初始化:对串口,计数器等硬件的初始化:计数值的读取、处理、计算:调用显示子程序,用于数据的显示。
鉴相计数程序主要用于电机方向的判断和计数脉冲值的处理。系统中电机方向的判断是靠计数器中的捕获模块捕获XA,XB信号来实现的。在程序中,设计一个寄存器保存电机的方向,当电机正转时,捕获模块捕获XA信号有效,在中断服务程序中将电机方向设为正转标志。反之亦然,当电机反转时,捕获XB有效,将电机方向设为反转标志。在主程序中只需根据寄存器的值,就可知道电机的旋转方向。为了防止计数器中正转,反转的计数值发生混乱,每次捕获发生时,在中断服务程序中都将计数器清零,重新计数,保证了电机换向后数据的准确性。
串行通讯模块用于实现上位PC机与单片机之间的数据传送。单片机可根据上位机的需要,将处理后的计数值上传给上位机,用于统计,打印等。系统采用中断方式进行数据传递,在接受中断服务程序中得到接受的上位机指令后,单片机就可将计数脉冲值,电机旋转方向等数据通过发送端口向上位机发送。串行通讯采用中断方式可大大节省CPU资源,从而保证了系统的高速度,高可靠性。
5、本文创新点
本文充分利用MSP430单片机软硬件的优点,简化了外围模块的设计,大大提升了系统的可靠性和稳定性。本设计系统在实际自动控制领域的运行中,系统工作稳定,收到了良好的效果,具有很好的实用价值。
更多编码器知识请访问http://www.elecfans.com/zhuanti/20111111242149.html
