0 引言
通常对电动机的转速或转向主要采用手动控制的方式,
但在有些情况下, 需要对电动机进行无线的遥控控制。本
文的提出是基于对农机土槽试验台的控制研究, 试验台采
用异步交流电动机作为动力源, 由于在实验过程中要对试
验台的速度进行实时调节, 并且需在远距离观察试验效果,
所以提出对电动机的速度进行遥控控制。系统采用
MSP430 单片机作为控制源, 通过变频器改变电源频率,
从而控制电动机的速度。这套系统通过选用适宜的变频器
和发射、接收模块方便地控制电动机速度, 具有电路简单,
性能可靠的特点。
1 交流电动机的调速
电动机调速方式: 1) 改变转差率s 调速, 用降低定子
绕组电压和绕线型三相异步电动机转子回路串电阻等方法
实现; 2) 改变电机定子绕组极对数p 调速; 3) 改变电机
供电电源频率f1调速。本文采用的是第三种调速方式, 变
频调速是目前最有发展前途的调速方式, 其核心是变频
器[1 ] 。
111 变频器的选择及参数设定
该系统选用深圳市康沃电器技术有限公司生产的CVF
- G1 - 4TX型变频器。输入额定电压、频率为380V、50/
60Hz ; 输出额定电压、频率为380V、0~300Hz。型号的
选择需要与选定的电动机型号相匹配, 具有随机、异步和
同步调制3 种PWM 调制方式, 在线可任意选择的性能特
点。变频器除了采用面板控制的方式外, 还提供控制回路
端子, 以实现外部信号的输入。
112 交流电动机和变频器接口设计
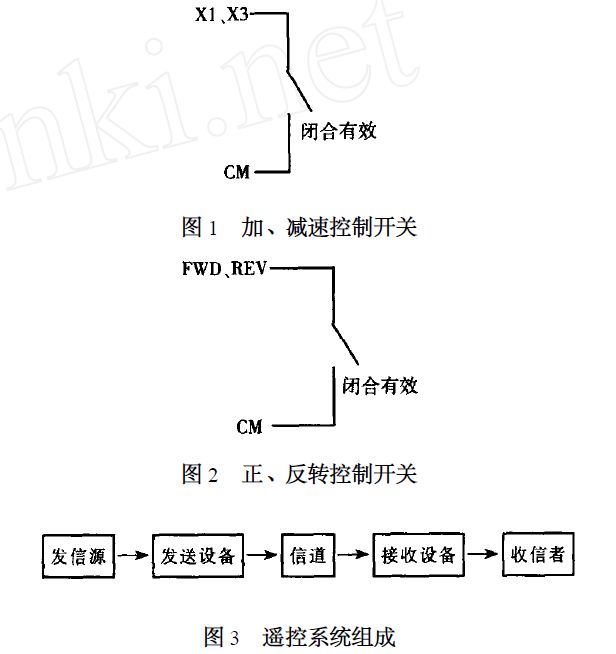
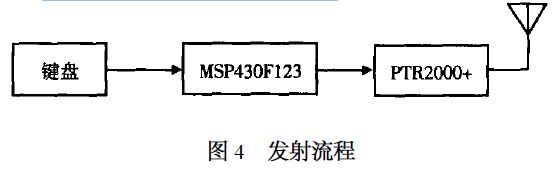
系统所用的端子为X1 和X3 (多功能输入端子) 、
FWD (正转控制命令端) 、REV (反转控制命令端) 、CM
(控制端的公共端) 。接通X1 和CM 则变频器输出频率增
加, 电机加速; 接通X3 和CM , 电机减速; 接通FWD 和
CM 电机加速; 接通REV 和CM 电机减速(图1 、2) 。这
些端口的状态全都由MSP430 为核心的控制电路控制[2 ] 。
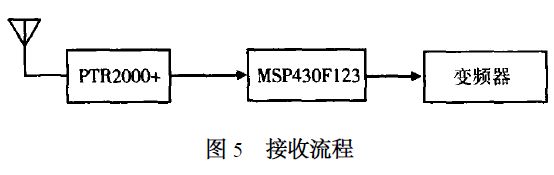
发信源采用TI 公司生产的低电压、超低功耗MSP430
系列单片机, 该系统采用MSP430 系列中的MSP430F123
型。该单片机具有256 字节的RAM 数据存储器和4K字节
的FLASHROM 程序存储器、两个UART ( Universal
Asynchronous Receiver/ Transmitter) 、22 个I/ O 端口; 发
射和接收模块的型号为PTR2000 + 。一种超小型、超低功
耗、高速率1912K 无线收发数传MODEM。作为发送设
备, 它所采用的是数字通信方式进行信息的传送[3 ] 。
3 硬件电路设计
发射和接收的流程见图4 、5 。
发射和接收部分均采用独立的供电方式, 电源为充电
电池, 这样可减小电源对硬件电路的干扰。发射部分的5
个按钮分别代表: 正转、反转、加速、减速、停止。与其
它部件无任何的有线联系, 可方便携带。接收部分通过信
号线与变频器输入端子相连, 通过继电器控制变频器的频
率变化。控制原理见图6 、7 。
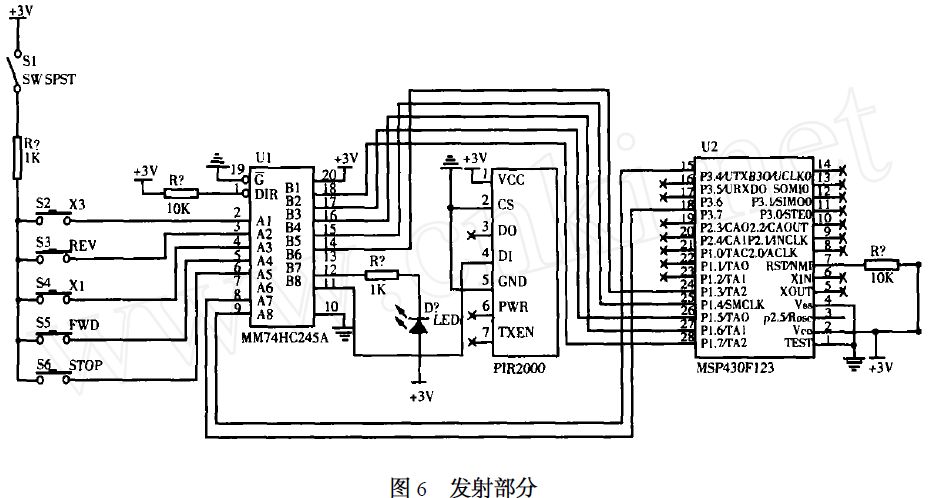
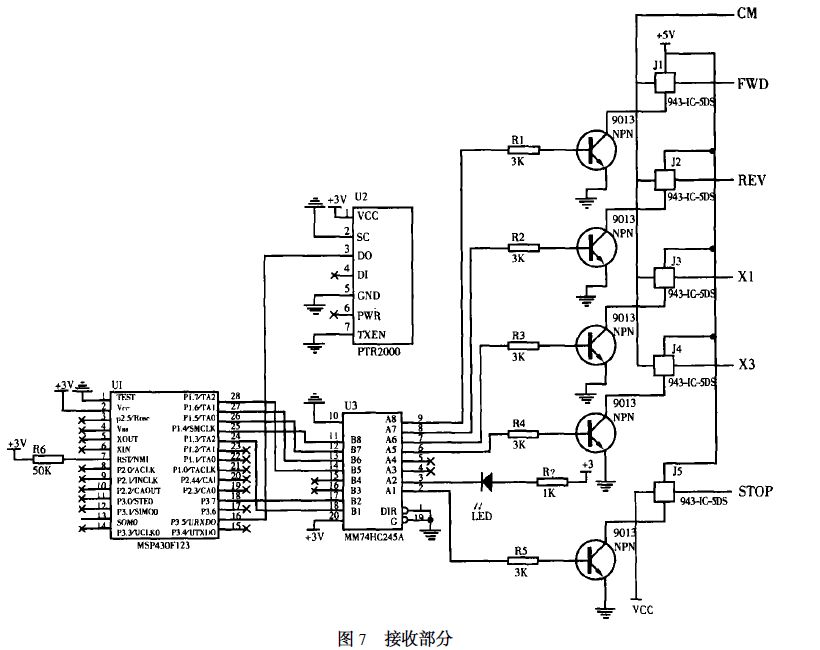
74HC245 内含有8 个具有3 态输出的双向总线收发
器。电源电压2~6V ; 工作速度可达到13ns ; 抗干扰性能
好; 能满足与MSP430 输出TTL 电平的匹配。
4 软件设计
软件设计是控制系统中不可缺少的部分, 它直接关系
到整个系统能否运行、效率高低。该系统采用汇编语言编
写程序, 充分利用MSP430 系列单片机简捷的指令, 实现
预期的控制目的。
411 发射部分工作原理
5 个按钮经过74HC245 分别与MSP430F123 的P113~
P117 相连, 并设置一个总开关控制发射部分的电源。每个
按钮按下时相应的MSP430F123 引脚为高电平, 并根据
P113~P117 引脚的状态进行处理, 将各个引脚的状态经串
口P314 输出。P314 与PTR2000 + 的DI 相连, 数据经
PTR2000 + 处理后无线传输出去。
412 接收部分工作原理
PTR2000 + 将接收到的信号变为数字信号, 直接与
MSP430F123 的输入串口P315 相连, MSP430F123 将接收
到的数据输出到P113~P117 , 这5 个引脚分别接9013 的基
极, 9013 的集电极与+ 5V 电源相连, 同时串接电磁继电
器, 电磁继电器的两个常开引脚与CM 和相应的FWD、
REV、X1 、X3 相连。变频器的CM、发射极接地。当P11 x
引脚为高电平时, 则相应的9013 集电极与发射极接通, 电
磁继电器吸合, 则CM 与相应的FWD、REV、X1 、X3 接
通来控制变频器的频率变化继而控制异步电动机的运行速
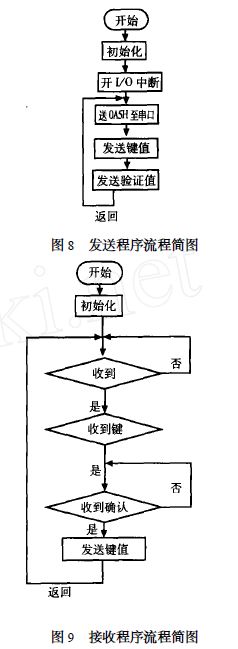
度。STOP 接口是用来停止电动机的。可靠性方面: 当发
送信息时, 首先发送一个固定的数值, 然后是按键信息,
最后确定信息; 接收时需确定接收到的信息是否为发送信
息。确定后将键的发送信息传给变频器, 否则不发送[4 ] 。
基本的程序流程如图8 、9 。
5 结语
本文选用适宜的部件, 通过简单的硬件电路设计达到
方便控制异步交流电动机的目的。特别选用MSP430 单片
机作为控制中心, 可以方便、高效、可靠地控制电路。系
统硬件电路简单, 软件简捷明了, 相对容易地实现了对电
动机的遥控控制, 在实际生产中有较高的应用价值。
来源:电子设计应用 作者: 时间:2008/12/11 0:00:00
