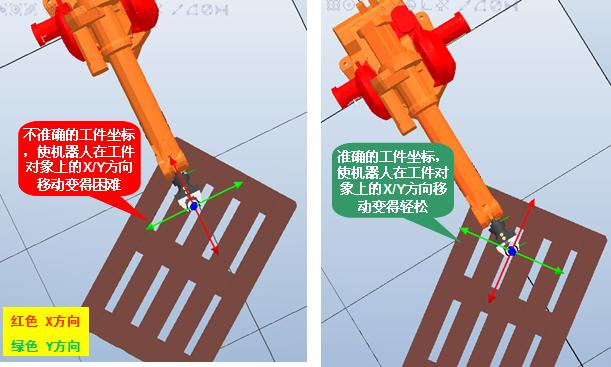
工件坐标,用一种通俗的说法就是,大家用尺子进行测量的时候,尺子上零刻度的位置作为测量对象的起点。在工业机器人中呢,在工作对象上进行运作的时候,也需要一个象尺子一样的零刻度的起点,方便进行编程和坐标的偏移。
|
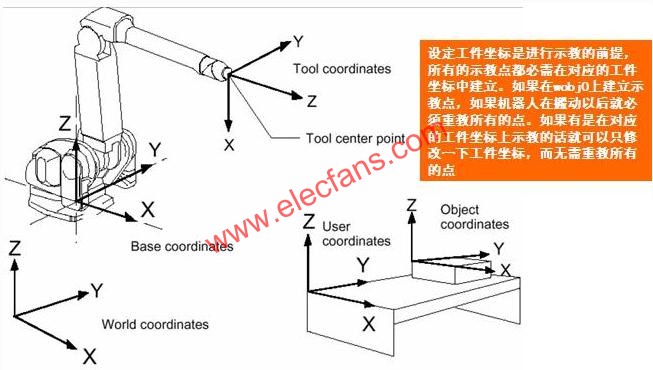
重要提醒:在进行所有示教工作之前,必须为你的轨迹建立对应的工件坐标。这是所有示教工作的起点。
|
上面说的是工件座标的作用,这里我们说说ABB机器人工件座标是怎么设定的。
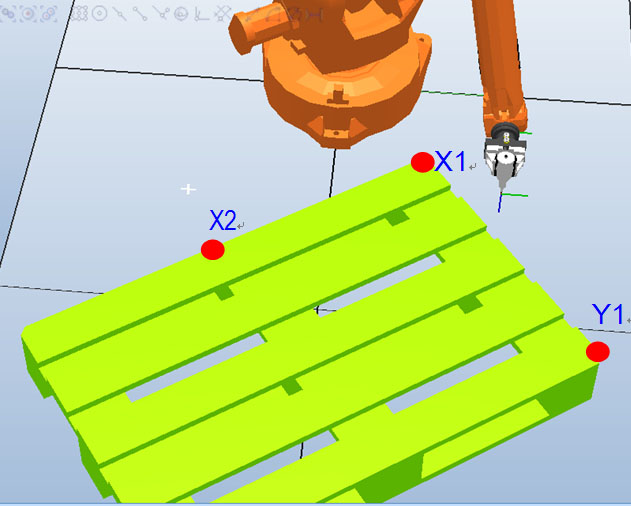
1、选定你要设定座标的工件。
2如图中所示,设定X1 X2 Y1这三个点。X1与X2之间的直线确定工件座标的X方向, X1是起点,到X2是正方向。X1与Y1之间的直线确定工件座标的Y方向, X1是起点,到Y1是正方向。
3下一次,我们要继续探讨TCP的设定,在完成这些设定以后,才开始示教会比较好一点。