要TMS320VC5416的多路加速度采集与处理系统的设计方法。该系统采用作为数据采集前端,通过的和级联,可实现多路模拟加速度信号的实时采集和处理。
TMS320VC5416;;加速度;数据处理
TMS320V C5416(DSP)作为处理器,用十六位高精度作为的多路加速度采集系统设计方法。
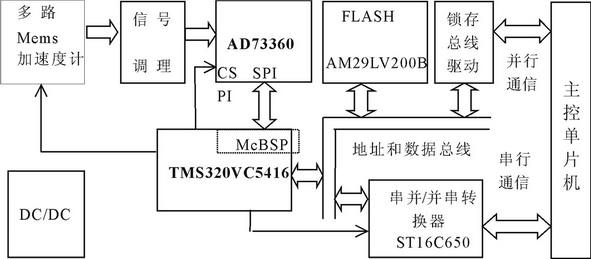
1 系统硬件原理图
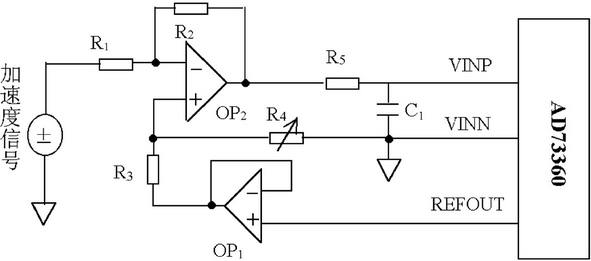
2加速度信号预处理电路
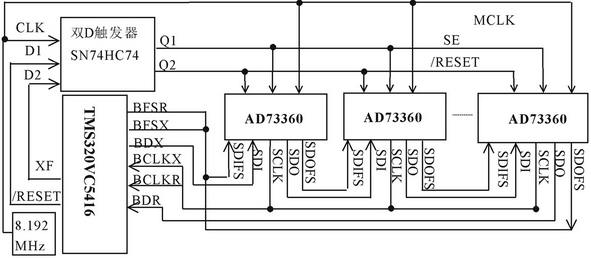
3AD73360与接口电路图
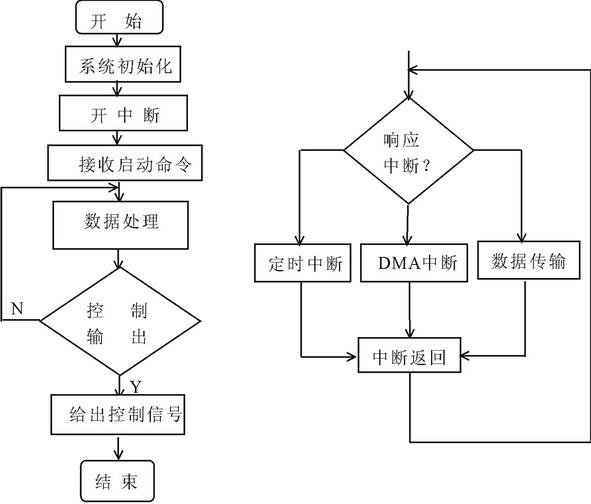
4 系统软件流程图
A/D转换电路、及其外围电路和通信接口电路组成,如图所示。
DSP通过或者写的方式将的片选引脚置为高电平,此时处于上电复位状态,输出同步帧信号,当采用图的接法时,可以通过的串口向写入控制字。由个寄存器来控制,控制字字长为位。
AD73360进行电路设计时,可直接用单极性输入方式,也可采取差动输入方式将单片接成三通道转换器。不过在用器件内部参考电压对模拟输入前端进行直流偏置时,最好采用高输入阻抗的运算放大器进行隔离。
2所示。
R和2对加速度信号进行取样。为了尽可能提高转换精度,减小电路板的体积,系统使用片内参考电压作直流偏置。在送到运算放大器2进行直流偏置之前,采用运算放大器1进行隔离,以确保的端子没有输入、输出电流,从而保证片内精密电压源电压恒定和较高的转换精度。最后,经5和1组成网络,抗混迭滤波后送到进行转换。
TMS320VC5416的
SPI,通过和的简单连接便可组成一个多通道同步数据采集系统。的复位信号、片选信号分别由器件的和引脚通过一个上升沿双触发器提供,这样可以确保的复位信号、片选信号和保持同步,以免发生读写错误。的输入输出时钟均由提供,即的同步缓冲串口工作于外部时钟模式。通过多片级联,最多可以实现路同步采集系统见图。系统在收到主控单片机的启动命令后,将置为高电平,处于上电复位状态,将控制字依顺序写到所有中,最后启动转换,系统开始对加速度信号进行采集。
TI公司专用芯片和。由于无片内,因此系统采用作为程序存储器,此芯片是位存储器。系统上电后,片内引导程序将中的工作程序加载到片内提高程序执行效率。
5V逻辑,故并行通信的握手信号和数据线均需采用进行电平隔离,同时数据总线需用进行锁存。并行通信的握手信号若采用读写的方式实现,数据传输效率会降低许多,所以系统将定义为通用口,用来和主控单片机握手,从而减少硬件开销,同时提高数据传输速度。片内无端口,要实现和主控单片机的串行数据通信,本系统采用
DSP程序,该系统在开发过程中采用汇编语言和语言相结合的方式进行软件开发。用语言编写程序主体,用汇编语言进行硬件接口程序编写。
4所示,其中左图为主程序流程,右图为中断程序流程。系统加电后,首先对、、和串并通信接口等进行初始化,然后等待主控单片机的启动命令,接收到启动命令后开始进行多路加速度信号的采集和处理,并将经过线性修正和滤波的加速度数据实时发送给主控单片机。
DMA中断程序和数据传输请求中断程序。当系统打开中断后,一旦收到启动命令,便启动,同时定时器开始计时;将转换后的离散加速度数据经直接送到并分类装到各个区间,当指定的数据块缓冲区充满以后,响应中断,对加速度值进行线性修正和数字滤波;若主控计算机数据请求中断产生,通过并口、串口向主控计算机发送加速度值和空间位置信息;若定时器产生中断,将开关变量置为。当中断返回后,继续进行加速度数据处理,并判断开关变量的状态,决定是否给出控制信号。
100Hz正弦信号作为模拟输入,用采样率进行采样。采集系统幅度和相位一致性较好,需要在实际应用中进一步检验其采集精度。
AD73360和进行加速度采集系统设计需注意以下几个问题:由于系统具有低功耗、双电源和高速度性能,在设计时需考虑芯片引脚的外接方式和工艺特性;的模拟电源和数字电源要隔离;和之间的接口在布线时需注意抗干扰,必要时可在串行数据线上串接AD73360提供的参考电压作直流偏置时,最好先用运算放大器隔离。