引言
在家用电器、供暖、通风、空调)和汽车应用中,DC无刷电机及其驱动器的使用率越来越高。造成这种现象的原因是其所拥有的高效、可靠、紧凑、低维护等级以及低噪声等优点,而这些都将转化为成本的节省。
家用电器常常运用传统技术,比如带有起动电容的AC磁阻单相电机和通用式电机。所有这些解决方案采用AC供电方式,工作速度都是恒定不变的,而且并未关注效率。
如今,客户所提出的要求越来越多,他们渴望拥有改良型功率分配方案、更加优越的性能以及更低的噪声电平:传统技术的局限性正日益凸显出来。
同时,市场竞争对能量-效率比提出了新的更高要求,用户在挑选家用电器时,除了产品的价格之外,还会对其能耗等级和噪声电平等特征加以比较。
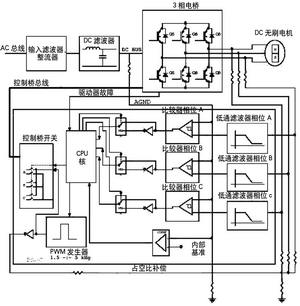
图1 永磁转子和定子
基本原理
无刷DC电机的工作原理非常简单。这种电机基于一个装有永久磁铁的转子和一个安装了三个相距120°的绕组的定子。三相逆变器按正确的顺序来驱动绕组,并生成一个用于对转子进行“磁推动”旋转磁场。逆变器根据转子的位置在绕组的6个不同的时间段里发生极化。转子的位置可采用位置传感器或机械式开关以不同的方式读出,也可以采用由转子位置所产生的磁场来估计。后一种方法被称为“反向EMF”。
显然,虚拟传感器具有多项优点,即:免除了相关的费用,而且,与霍尔效应传感器截然不同是,它不会破损。这就意味着可靠性和效率的提高以及重量和体积的减小。
但是,这种无传感器型解决方案需要进行更加复杂的处理,以精确估测 转子的位置,或对绕组的6个起动相位进行正确的驱动。
在每一转的6相中,每次只对两个绕组进行供电。第三个绕组(也是唯一未被施加偏压的绕组)正是允许读出由转子旋转所产生的电压以及其位置的绕组。
控制完全依赖于使定子的驱动相位与读出操作之间保持一个规定的恒定距离(用角度来表示)。
事实上,控制本身并没有任何特殊的要求,但是设计师不得不面对源自高电流的噪声问题。因此,必须对反向EMF读出电平进行补偿和滤波处理,以降低噪声电平。总之,控制系统的效率依存于准确获知转子位置以及正确驱动绕组相位的能力。但是滤波器增加了一个取决于信号频率和转速的固有相移。
在滤波过程中,如果产生了一个与速度有关的相位误差(随后是一个非恒定误差),那么在启动条件下将遭遇失败。也就是说,将无法获悉转子的确切位置。
为了解决这一问题,可以采用针对不同转速的相应滤波器,从而优化相位误差校正。通常,该解决方案需要巨大的处理能力,而这种处理能力只能由DSP或基于分立元件的可配置滤波器来提供。但是,这些滤波器需要使用大量的外部元件。
PSoC
为此,赛普拉斯推出的创新方案,并非基于传统型微控制器,而是一款先进的可编程系统级芯片—PSoC(见图1),通过PSoC嵌入式基本组件、运算放大器和开关电容器,可以构建所有必需的外设。用户可根据自己的需要来选择低通滤波器拓扑结构如Butterworth、Bessel和Chebechev,这些滤波器的特点各不相同。
对于本文所讨论的应用,低通Bessel滤波器提供了一个与交换值频率成比例的相移:这使得对相移的影响尽可能地小,而它是与滤波信号关联度最高的特性。
由于本文所涉及的应用的主要的目标是获知转子的位置。因此PSoC的第二个特性相当重要。低通Bessel滤波器的相移取决于信号的频率,并在逐渐接近滤波器本身的交叉频率时发生变化。在PSoC中,滤波器基于开关电容,因此,滤波器特性(主要是相移)可在滤波器的交叉频率发生变化时保持恒定。这种解决方案是采用标准分立元件所无法实现的,而如果采用PSoC,这就转化成了滤波器模拟块上的一个简单的开关频率漂移。显然,如果用户把该频率漂移与通过给定子相位供电来驱动的旋转磁场的频率联系起来,就能够成功地解决这个问题:对反向EMF信号的读出电平进行滤波,而且,滤波器的交叉频率是随着转速而线性移动的,因此由于对于所有的速度,滤波操作的相移都是恒定的。
PSoC架构的固有灵活性再次使得能够对此问题进行详细的分析,从而造就了一种理想的解决方案。该解决方案可在任何架构约束条件下得以实现。