新技术和新科技超越了基于模拟的抖动分析方法
Tektronix公司DAN WOLAVER著
---- 抖动分析跟随着科技从模拟到数字的转变进程,正如在电话、电视、摄影、音乐和视频领域里进行的一样。 ---- 现有的测试标准受模拟抖动分析能力的限制。基于数字的抖动分析方法有先进得多的特性,能使工程师们为下一代设计的测试和分析作更充分的准备。新的特性广泛用于业界以后,自然会产生未来的新的测试标准。 |  图:为保证全球通信网络中的无错数据收发,抖动测试已成为10Gbit/s测试的一个极其重要的部分。 图:为保证全球通信网络中的无错数据收发,抖动测试已成为10Gbit/s测试的一个极其重要的部分。
|
模拟抖动测量
---- 典型的方法是在一个不返零(NRZ)数据信号上进行抖动测量。先从NRZ信号上恢复一个时钟,有效地填入丢失的数据沿。由于这通常是在有限的带宽上由一个锁相环电路完成的,抖动就必须是低通的,抖动噪声就会附加在过程当中。为给相位检测器一个更大的动态范围,恢复过来的时钟被分开--可能是被4分--以得到一个4单元间隔(UI)的峰峰值范围。 ---- 要测的抖动是X信号上的抖动,基准时钟信号来自于它,X信号将与基准时钟信号作比较。来自基准时钟的锁相环信号的带宽很窄(可能只有10Hz),获取时间可能有几秒。相位检测器产生的模拟电压Vd均衡了X信号和基准时钟信号之间的相位差。 ---- 实际上,Vd是一串宽度与相位差成比例的脉冲。但这个脉冲波形的平均值(图1中虚线曲线)是个与相位差成比例的模拟电压。平均值由低通滤波器实现,这就进一步限制了抖动测量的频率范围。电信标准中详细说明了这种滤波器的原理。 |  图1:经典的模拟抖动测量方法将数据信号与基准时钟信号相比较,使用相位探测器的平均输出。 图1:经典的模拟抖动测量方法将数据信号与基准时钟信号相比较,使用相位探测器的平均输出。
|
---- 模拟测量方法带来了很多问题,这都是因为相位探测器将相位表达成一个模拟电压: - 时钟恢复限制了抖动测量的带宽。
- 时间恢复由于自由运行频率的偏移引入抖动噪声。
- 大动态范围要求大频率分割,导致产生了超出相位探测器范围的低频脉冲,进一步限制了测量的带宽。
- 模拟电压受制于由噪声和寄生电容产生的负面影响。
- 模拟电压的范围受制于电源电压的范围。
- 基准恢复由于其带宽小获得锁相很慢。
数字抖动测量
---- 图2显示的是数字方法测量抖动的功能方框图。这里的目标是将每个NRZ沿用二进制数作时间标记,其中最不重要的位(LSB)是分辨率。(时间间隔分辨器完成这个功能,但不是在每个沿上,也不是在一个连续的基础上。) | 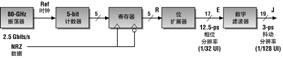 图2:数字抖动测量方法用计数器对NRZ沿进行数字标记。 图2:数字抖动测量方法用计数器对NRZ沿进行数字标记。
|
---- 基准振荡器以32倍的波特驱动一个5位计数器。这样每个波特的UI,计数器从0到31循环一次。当NRZ信号沿(上升或下降)出现时,它将目前的计数锁入一个寄存器。 ---- 该数字代表UI内边沿的相位,其中LSB重是1/32 UI。5位的相位数字扩展到17位,减少了相位从一个UI移动到下一个UI时的过流。 ---- 最后,数字滤波器提供抖动测量所需的高通和低通滤波。在滤波过程中,可实现分辨率中两个最佳位。抖动得到进一步的处理以检测峰峰值、真有效值或其它参数,比如频谱容量。 ---- 数字抖动测量有以下几个优点: - 更宽的带宽,更低的噪声,因为不需要时钟恢复。
- 更宽的带宽和更光滑的频率响应,因为数字相位探测器将每个NRZ沿以时间标记(没有模拟脉冲要平均)。
- 更低的抖动噪声,因为数字时间标记不受噪声的负面影响。
- 增益误差率只有0.01%,因为信号处理是完全数字的。
- 动态范围超过4000UIp-p,同时保持0.01UI的分辨率。
- 测量时没有延时,因为没有锁相环信号去获取时钟。
---- 数据调理 ---- 由于图2中的时间标记是一个5位数,它的范围仅在25×1/32UI=1UIp-p。我们要求的范围是217×1/32UI=4096UI。表中的位扩展器将相位扩展到17位数字,同时修正R的过流,通过监视连续采样之间的相位变化实现。 ---- 如果变化超过+0.5UI(比如是+0.6UI),实际上被认为是负变化(例子中是-0.4UI)。同样,如果变化超过-0.5UI(比如-0.7UI),实际上被认为是正变化(例子中是+0.3UI)。 ---- 低通滤波器的输入E有个12.5ps或1/32UI的分辨率。图2中数字滤波器的低通滤波过程产生了一个更好的分辨率。在效果上,滤波器平均了四个连续的相位采样,产生一个为起初分辨率的1/4的分辨率。它用3ps或1/128UI的LSB重量给输出J增加了2位。高频相位抖动被加入被测相位以保证两个添加位的有效。 ---- 图3中普遍的12.5ps延时的不均匀的间隔导致了相位测量的非线性。因为系统是数字的,可重复的,非线性可被测量并存储到一个查找表中(RAM),用于更正实时被测相位。被存数值是被测相位的1/32UI分辨率的四倍。因此被校正的测量值有19位,并带有一个1/128UI的分辨率(与图2中的J一样)。 | 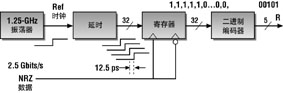 图3:用1.25GHz的时钟频率可获得12.5ps的抖动分辨率。 图3:用1.25GHz的时钟频率可获得12.5ps的抖动分辨率。
|
更快的测量
---- 上述数字相位测量方法已由一个SiGe ASIC引入Tektronix的示波器,称为数字相位分析仪(DPA)。这个电路可测2.5GHz波特的信号抖动。为将数字相位扩展到10GHz,需要使用时钟恢复和混合将频率减至2.5GHz,如图4所举例子。 | 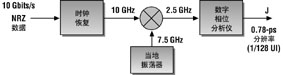 图4:数字相位测量已通过2.5GHz时钟恢复和混合扩展至10Gbit/s。 图4:数字相位测量已通过2.5GHz时钟恢复和混合扩展至10Gbit/s。
|
---- 在混合之前,10Gbit/s的NRZ数据必须被转换成10GHz的时钟。时钟恢复电路会添加抖动噪声,因为它的自由运行频率会出现错误。Tektronix公司申请了技术专利,可通过将恢复时钟的抖动关联到NRZ数据类型上将自由运行的频率错误减至零。 ---- 混合器将恢复的10GHz时钟拍频至一个当地的7.5GHz振荡器,产生一个2.5GHz的时钟。可以看到这个2.5GHz时钟与10Gbit/s NRZ信号在UI中有同样的抖动。因此1/128-UI分辨率和DPA的400UIp-p范围适合10Gbit/s信号的抖动测量。但10Gbit/s信号的1/128UI符合0.78ps。(在这里0.78ps=100ps/128)。