1 引言
随着电力电子技术和微电子技术的发展,脉宽调制技术(PWM)和正弦脉宽调制技术(SPWM)在电机控制系统中已经得到越来越多的应用。使用SPWM 来控制电机系统,电路结构简单,成本较低,但系统性能不高,电压利用率不高,谐波成分较大。近年来电机的空间矢量理论被引入电机控制系统中,形成了空间矢量脉宽调制技术(SVPWM),其原理是就是利用逆变器各桥臂开关控制信号的不同组合,使逆变器的输出空间电压矢量的运行轨迹尽可能接近圆形。SVPWM 与常规的SPWM 相比,能明显减小逆变器输出电压的谐波成分,降低脉动转矩,而且有较高的电压利用率,更易于数字实现,因而在交流感应电机控制中,应用前景十分看好。
2 SVPWM 脉宽调制原理
2.1 八个电压空间矢量与扇区划分
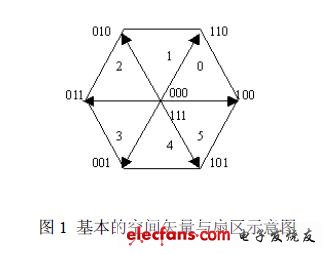
空间矢量脉宽调制SVPWM 实际上对应于交流感应电机中的三相电压源逆变器的功率器件的一种特殊的开关触发顺序和脉宽大小的组合。在采用三相逆变器对异步电机供电时,根据逆变器的工作原理可以知道,逆变桥共有23 =8 种状态,若将逆变器的八种状态用电压空间矢量来表示,则形成8 个基本的电压空间矢量,其中6 个非零矢量,2 个零矢量,每两个电压矢量在空间相隔60o,如图1 所示[2] 。SVPWM 技术的目的是通过与基本的空间矢量对应的开关状态的组合得到一个给定的定子参考电压矢量。
2.2 SVPWM 的实现
SVPWM 信号的实时调制需要定子参考电压矢量的二维静止坐标系α轴和β轴的分量uα。 s 、uβ。 s 以及PWM 周期Tpwm 作为输入,其产生框图如图2 所示。
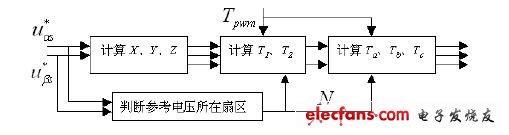
图2 SVPWM 产生框图
2.2.1 相邻两矢量作用时间的确定
定义如下X、Y、Z 三个变量: 。
。
参考电压矢量位于被基本空间矢量所包含的扇区中时,矢量作用时间的相对值T1 和T2 可以用X,Y 或Z 表示,它们的对应关系如表1 所示。表1T1、T2 与X、Y、Z 的对应关系表
表1 T1、T2 与X、Y、Z 的对应关系表
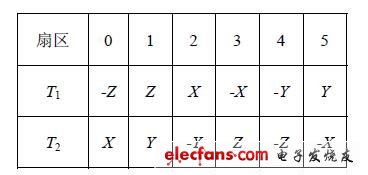
对不同扇区的T1、T2,按表1 所示取值,还要对其进行饱和判断:如果T1+T2>Tpwm, 则T1= T1*Tpwm/(T1+ T2),T2= T2*Tpwm/(T1+ T2)。
2.2.2 判断定子参考电压矢量所在扇区
定义三个参考量Vref1 、Vref2 、Vref3 ,令Vref 1 =X;Vref 2 =.Z;Vref 3 =.Y 。
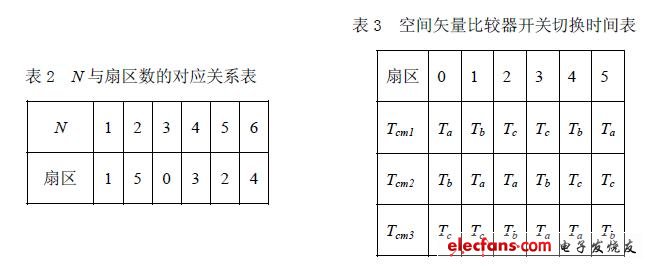
如果Vref1>0,则A=1,否则A=0;如果Vref2>0,则B=1,否则B =0;如果Vref3>0,则C=1,否则C =0。设N =A +2B +4C ,则N 与扇区数的对应关系如表2 所示。
2.2.3 确定比较器的切换点
定义:
经过上式计算就可得到SVPWM 的参考调制信号,最后根据扇区确定电压空间矢量切换点Tcm1、Tcm2、Tcm3,如表3 所示。
3 电流注入型感应电机矢量控制方案
3.1 电流注入型感应电机矢量控制系统
电流注入型矢量控制方案适用于中小功率、高开关频率的矢量控制系统。此时控制系统的定子参考电压完全可以由定子电流控制器提供,而无需考虑电机的定子电压方程。逆变器开关频率较高,而且电流控制器鲁棒性足够强,控制系统可以实现快速的定子电流控制,其实现方案如图3 所示。同时,这种控制技术采用空间矢量PWM 技术输出参考电压,所以它能获得很好的电流频谱。
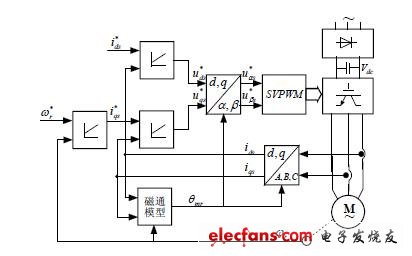
图3 间接转子磁场定向电流注入型感应电机矢量控制方案
由于电机是星形接法,无零序电流分量,所以该控制系统只需要测量电机的两相电流,第三相电流可以通过方程iCs=-iAs-iBs 求出。此外,控制系统还需要测量电机的转速,用于实现转速闭环控制和计算转子磁链位置角。控制系统总共包含转速控制器、励磁电流控制器和转矩电流控制器等三个控制器,通常情况下,这三个控制器可以是PID 控制器。
转子磁场定向坐标系下的磁通模型如下式所示,可以看出,电机的励磁电流分量imr 只与定子电流d 轴分量ids 有关,而不受定子电流q 轴分量iqs 的影响,说明在转子磁场定向坐标系下,感应电机的励磁电流分量和转矩电流分量是完全解耦的。
3.2 间接转子磁场定向电流注入型感应电机矢量控制系统仿真
利用MATLAB/SIMULINK 对本文提出的SVPWM 实现方案及间接转子磁场定向电流注入型矢量控制系统进行仿真实验,仿真时异步电动机参数为:额定功率Pe=4kW,额定电压Ue=380V,极对数np=3,额定转速ne=960r/min ,定子电阻Rs=3.21.,转子电阻Rr=3.5219.,定子自感Ls=649.4mH ,转子自感 Lr=“649”.4mH ,定转子互感 Lm=“622”.2mH, 转动惯量 J=“0”.12kgm2 。系统仿真模型参照图3 而建立。该模型中包含有三个电流控制器、一台感应电动机、电机变量测量模块、磁通模型、坐标变换模块和功率变换器模块(SVPWM 产生和逆变器模块封装在一起)等等。
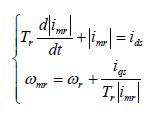
系统仿真结果如图4 所示。图4(a)所示是系统在额定负载条件下的转速阶跃响应波形。在t=1s 时刻前,系统处于静止励磁阶段,以建立额定转子磁通,如图4(b)所示。T=1s 时刻,系统转速给定由0 阶跃为80 rad/s ,该矢量控制系统的转速调节器迅速饱和,电机转速在最大转矩作用下以恒定加速度接近给定值,并在0.5s 内到达稳态,而且基本上没有稳态误差和超调。图4(c)所示为控制系统的转矩电流分量。图4(d)为定子电流A 相的电流波形。从仿真结果可以看出,该矢量控制系统的转速阶跃响应既没有超调,也没有稳态误差,而且在整个动态过程中,转子励磁电流分量基本保持不变,说明在负载扰动过程中矢量控制系统都能保持电机励磁电流分量和转矩电流分量的解耦控制,并具有良好的快速性。
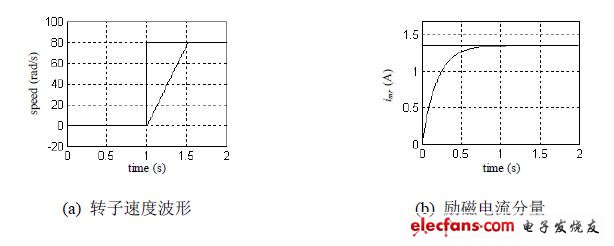
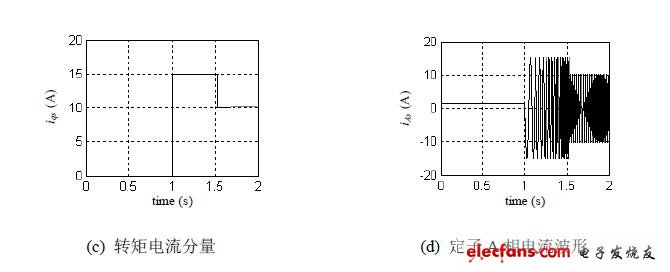
图4 仿真实验结果
4 结语
本文采用基于SVPWM 的控制技术,应用MATLAB/SIMULINK 仿真软件,建立了感应电机SVPWM 控制系统仿真模型,仿真结果表明,系统具有很好的鲁棒性和快速性,这种控制技术可以实现感应电机产生转矩的电流分量和产生磁通的电流分量之间的解耦控制,使感应电机获得与他励直流电机一致的瞬态响应特性,实现对负载扰动和参考值变化的快速响应。本文建立的模型为进一步研究变频调速系统提供了基础模型,其使用的灵活性,操作的简单性以及仿真的准确性为进行感应电机矢量控制系统的DSP 数字化设计打下了良好的基础。
本文作者创新点:提出了一种基于MATLAB/SIMULINK 空间矢量脉宽调制技术实现方式,建立了间接转子磁场定向电流注入型矢量控制系统仿真模型,仿真结果表明不但模型是正确的,而且系统具有良好的鲁棒性和快速性,为下一步该系统的DSP 数字化设计打下基础。
